23 Ιουνίου 2020
18 Απριλίου 2018
case studies
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx hhhh h hh h hh h hh h h h h h h hhhh hh
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx
“Tin Rhythm” by Celena Tang DDA Interactive Arts BFA from DDA Pratt on Vimeo.
INTERACTIVE VOICE-VISUAL INSTALLATION-DDA PRATT
Hyesoo Chang “Uncertainty Principle of the Invisible” MFA Thesis 2017 from DDA Pratt on Vimeo.
Δεν επιτρέπεται σχολιασμός στο case studies
7 Οκτωβρίου 2015
Golan Levin – osoi asxoliste me ixo i programatismo genika dite to
Δεν επιτρέπεται σχολιασμός στο Golan Levin – osoi asxoliste me ixo i programatismo genika dite to
17 Νοεμβρίου 2014
arduino14
void setup() {
Serial.begin(9600);
}
Serial.begin(9600);
}
void loop() {
Serial.write(analogRead(A0)/4);
delay(1);
}
import processing.serial.*;
Serial myPort;
PImage logo;
int bgcolor = 0;
void setup() {
colorMode(HSB, 255);
logo = loadImage(“http://arduino.cc/logo.png”);
size(logo.width, logo.height);
println(“Available serial ports:”);
println(Serial.list());
myPort = new Serial(this, Serial.list()[5], 9600);
}
void draw() {
if(myPort.available() > 0) {
bgcolor = myPort.read();
println(bgcolor);
}
background(bgcolor, 255, 255);
image(logo, 0, 0);
}
Δεν επιτρέπεται σχολιασμός στο arduino14
Arduino13-feely Lamp
#include
CapacitiveSensor capSensor = CapacitiveSensor(4,2);
int threshold = 1000;
const int ledPin = 12;
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
}
void loop() {
long sensorValue = capSensor.capacitiveSensor(30);
Serial.println(sensorValue);
if(sensorValue > threshold) {
digitalWrite(ledPin, HIGH);
}
else {
digitalWrite(ledPin, LOW);
}
delay(10);
}
Δεν επιτρέπεται σχολιασμός στο Arduino13-feely Lamp
ARDUINO12-
#include
Servo servo9;
const int piezo = A0;
const int switchPin = 2;
const int yellowLed = 3;
const int greenLed = 4;
const int redLed = 5;
int knockVal;
int switchVal;
const int quietKnock = 10;
const int loudKnock = 100;
boolean locked = false;
int numberOfKnocks = 0;
void setup() {
servo9.attach(9);
pinMode(yellowLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(redLed, OUTPUT);
pinMode(switchPin, INPUT);
Serial.begin(9600);
digitalWrite(greenLed, HIGH);
servo9.write(0);
Serial.println(“The box is unlocked!”);
}
void loop() {
if(locked == false) {
switchVal = digitalRead(switchPin);
if(switchVal == HIGH) {
locked = true;
digitalWrite(greenLed, LOW);
digitalWrite(redLed, HIGH);
servo9.write(90);
Serial.println(“The box is locked!”);
delay(1000);
}
}
if(locked == true) {
knockVal = analogRead(piezo);
if(numberOfKnocks 0) {
if(checkForKnock(knockVal) == true) {
numberOfKnocks++;
}
Serial.print(3 – numberOfKnocks);
Serial.println(” more knocks to go”);
}
if(numberOfKnocks >= 3) {
locked = false;
servo9.write(0);
delay(20);
digitalWrite(greenLed, HIGH);
digitalWrite(redLed, LOW);
Serial.println(“The box is unlocked!”);
}
}
}
boolean checkForKnock(int value) {
if(value > quietKnock && value < loudKnock) {
digitalWrite(yellowLed, HIGH);
delay(50);
digitalWrite(yellowLed, LOW);
Serial.print(“Valid knock of value “);
Serial.println(value);
return true;
}
else {
Serial.print(“Bad knock value “);
Serial.println(value);
return false;
}
}
Δεν επιτρέπεται σχολιασμός στο ARDUINO12-
ARDUINO11-Crystal Ball



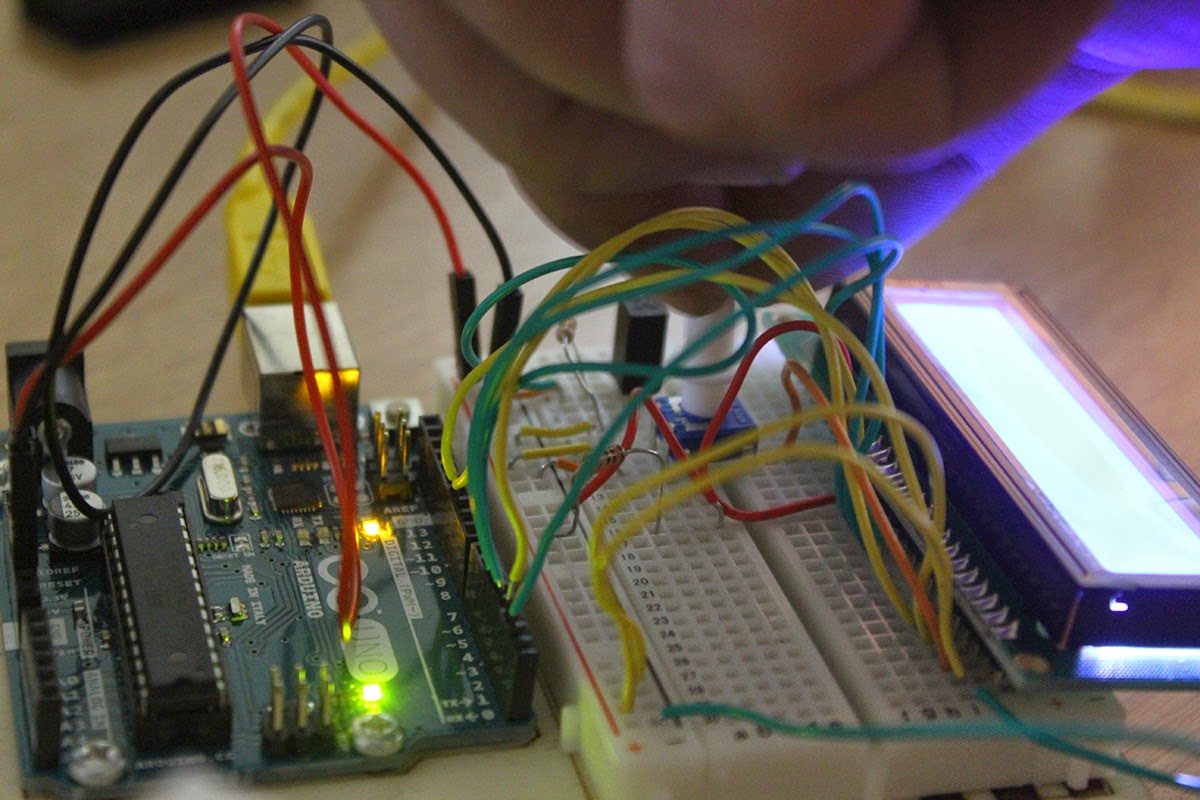


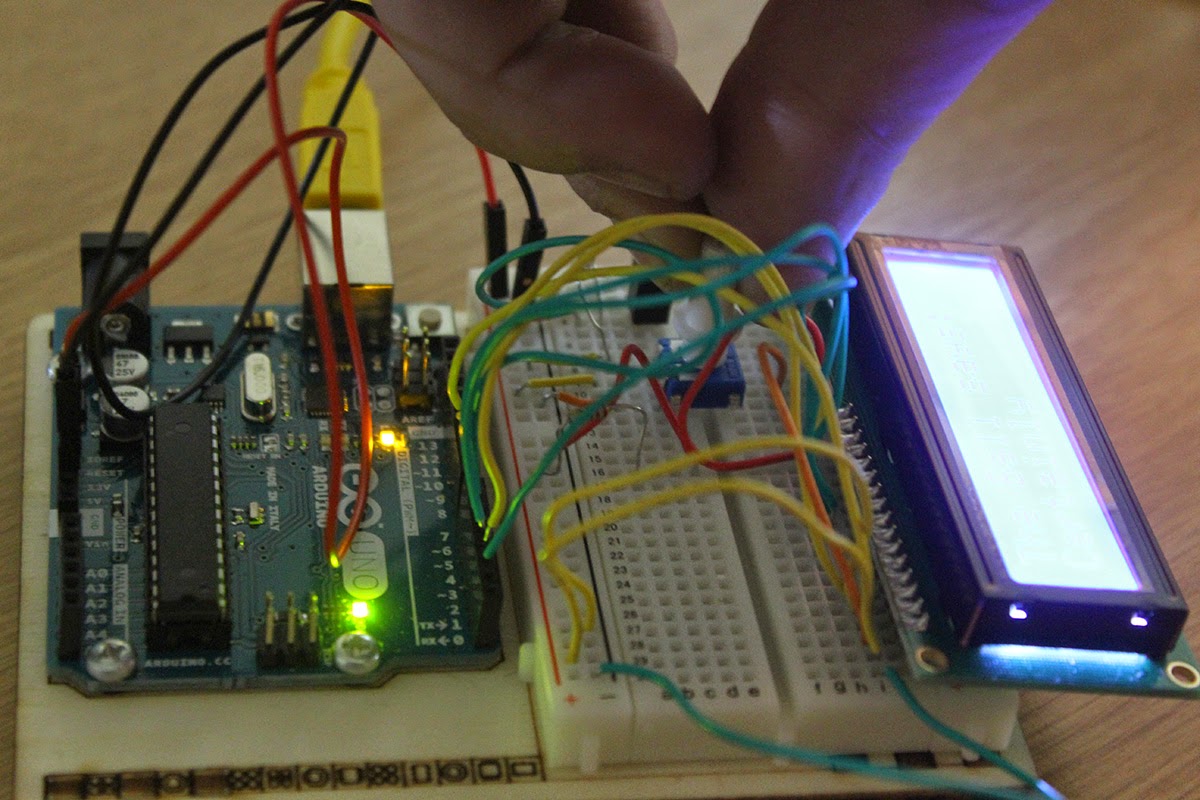


THE CODE FOR 11
#include
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
const int switchPin = 6;
int switchState = 0;
int prevSwitchState = 0;
int reply;
void setup() {
lcd.begin(16, 2);
pinMode(switchPin, INPUT);
lcd.print(“Ask the”);
lcd.setCursor(0, 1);
lcd.print(“Crystal Ball!”);
}
void loop() {
switchState = digitalRead(switchPin);
if(switchState != prevSwitchState) {
if(switchState == LOW) {
reply = random(8);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(“The Ball says: “);
lcd.setCursor(0, 1);
switch(reply) {
case 0:
lcd.print(“Yes”);
break;
case 1:
lcd.print(“Most likely”);
break;
case 2:
lcd.print(“Certainly”);
break;
case 3:
lcd.print(“Outlook good”);
break;
case 4:
lcd.print(“Unsure”);
break;
case 5:
lcd.print(“Ask again”);
break;
case 6:
lcd.print(“Doubtful”);
break;
case 7:
lcd.print(“No”);
break;
}
}
}
prevSwitchState = switchState;
}
Δεν επιτρέπεται σχολιασμός στο ARDUINO11-Crystal Ball
16 Νοεμβρίου 2014
Music Controller with Kinect + openFrameworks + Mac
[youtube https://www.youtube.com/watch?v=IRpm9Qcnp-k]
Δεν επιτρέπεται σχολιασμός στο Music Controller with Kinect + openFrameworks + Mac
Tutorial for Arduino:
[youtube https://www.youtube.com/watch?v=abWCy_aOSwY]
[youtube https://www.youtube.com/watch?v=PeScmRwzQho?list=PL5D114A4EF03B87E0]
Δεν επιτρέπεται σχολιασμός στο Tutorial for Arduino:
ARDUINO10 -Zoetrope




const int controlPin1 = 2;
const int controlPin2 = 3;
const int enablePin = 9;
const int directionSwitchPin = 4;
const int onOffSwitchStateSwitchPin = 5;
const int potPin = A0;
int onOffSwitchState = 0;
int previousOnOffSwitchState = 0;
int directionSwitchState = 0;
int previousDirectionSwitchState = 0;
int motorEnabled = 0;
int motorSpeed = 0;
int motorDirection = 1;
void setup() {
pinMode(directionSwitchPin, INPUT);
pinMode(onOffSwitchStateSwitchPin, INPUT);
pinMode(controlPin1, OUTPUT);
pinMode(controlPin2, OUTPUT);
pinMode(enablePin, OUTPUT);
digitalWrite(enablePin, LOW);
}
void loop() {
onOffSwitchState = digitalRead(onOffSwitchStateSwitchPin);
delay(1);
directionSwitchState = digitalRead(directionSwitchPin);
motorSpeed = analogRead(potPin)/4;
if(onOffSwitchState != previousOnOffSwitchState) {
if(onOffSwitchState == HIGH) {
motorEnabled = !motorEnabled;
}
}
if (directionSwitchState != previousDirectionSwitchState) {
if (directionSwitchState == HIGH) {
motorDirection = !motorDirection;
}
}
if (motorDirection = 1) {
digitalWrite(controlPin1, HIGH);
digitalWrite(controlPin2, LOW);
}
else {
digitalWrite(controlPin1, LOW);
digitalWrite(controlPin2, HIGH);
}
if (motorEnabled == 1) {
analogWrite(enablePin, motorSpeed);
}
else {
analogWrite(enablePin, 0);
}
previousDirectionSwitchState = directionSwitchState;
previousOnOffSwitchState = onOffSwitchState;
}


[youtube https://www.youtube.com/watch?v=zaODBPJ8bBk&w=420&h=315]
Δεν επιτρέπεται σχολιασμός στο ARDUINO10 -Zoetrope
ARDUINO09-Motorized Pinwheel




const int switchPin = 2;
const int motorPin = 9;
int switchState = 0;
void setup() {
pinMode(motorPin, OUTPUT);
pinMode(switchPin, INPUT);
}
void loop() {
switchState = digitalRead(switchPin);
if(switchState == HIGH){
digitalWrite(motorPin, HIGH);
}
else {
digitalWrite(motorPin, LOW);
}
}



[youtube https://www.youtube.com/watch?v=6jY_dkWGakk]







[youtube https://www.youtube.com/watch?v=lHVZikxGXk0]
Δεν επιτρέπεται σχολιασμός στο ARDUINO09-Motorized Pinwheel
ARDUINO08-DIGITAL HOURGLASS
const int switchPin = 8;
unsigned long previousTime = 0;
int switchState = 0;
int prevSwitchState = 0;
int led = 2;
long interval = 3000;
void setup() {
for(int x = 2; x < 8; x++) {
pinMode(x, OUTPUT);
}
pinMode(8, INPUT);
Serial.begin(9600);
}
void loop() {
unsigned long currentTime = millis();
if(currentTime – previousTime > interval){
previousTime = currentTime;
digitalWrite(led, HIGH);
led++;
if(led == 7){
}
}
switchState = digitalRead(switchPin);
Serial.println(switchState);
if(switchState != prevSwitchState){
for(int x = 2; x < 8; x++){
digitalWrite(x, LOW);
}
led = 2;
previousTime = currentTime;
}
prevSwitchState = switchState;
}
[youtube https://www.youtube.com/watch?v=hfyNJO4BjDY]
Δεν επιτρέπεται σχολιασμός στο ARDUINO08-DIGITAL HOURGLASS
ARDUINO07-KEYBOARD INSTRUMENTS
int notes[] = {262, 294, 330, 349};
void setup() {
Serial.begin(9600);
}
void loop() {
int keyVal = analogRead(A0);
Serial.println(keyVal);
if (keyVal == 1023) {
tone(8, notes[0]);
}
else if(keyVal >= 990 && keyVal <= 1010) {
tone(8, notes[1]);
}
else if(keyVal >= 505 && keyVal <= 515) {
tone(8, notes[2]);
}
else if(keyVal >= 5 && keyVal <= 10) {
tone(8, notes[3]);
}
else {
noTone(8);
}
}
void setup() {
Serial.begin(9600);
}
void loop() {
int keyVal = analogRead(A0);
Serial.println(keyVal);
if (keyVal == 1023) {
tone(8, notes[0]);
}
else if(keyVal >= 990 && keyVal <= 1010) {
tone(8, notes[1]);
}
else if(keyVal >= 505 && keyVal <= 515) {
tone(8, notes[2]);
}
else if(keyVal >= 5 && keyVal <= 10) {
tone(8, notes[3]);
}
else {
noTone(8);
}
}
[youtube https://www.youtube.com/watch?v=KJ_Ie5GfBE0]
Δεν επιτρέπεται σχολιασμός στο ARDUINO07-KEYBOARD INSTRUMENTS
15 Νοεμβρίου 2014
ARDUINO 06-light theremin
int sensorValue;
int sensorLow = 1023;
int sensorHigh = 0;
const int ledPin = 13;
void setup() {
pinMode(ledPin, OUTPUT);
digitalWrite(ledPin, HIGH);
while (millis() < 5000) {
sensorValue = analogRead(A0);
if (sensorValue > sensorHigh) {
sensorHigh = sensorValue;
}
if (sensorValue < sensorLow) {
sensorLow = sensorValue;
}
}
digitalWrite(ledPin, LOW);
}
void loop() {
sensorValue = analogRead(A0);
int pitch = map(sensorValue, sensorLow, sensorHigh, 50, 4000);
tone(8, pitch, 20);
delay(10);
}
[youtube https://www.youtube.com/watch?v=jJWGSFjNYMw&w=420&h=315]
Δεν επιτρέπεται σχολιασμός στο ARDUINO 06-light theremin
ARDUINO 05 MOOD CUE
1. Ορισμός του πυκνωτή – μονάδες χωρητικότητας
Πυκνωτής ονομάζεται η διάταξη εκείνη που αποτελείται από δύο αγώγιμες πλάκες οι οποίες χωρίζονται μεταξύ τους από κάποιο μονωτικό υλικό. Οι αγώγιμες πλάκες ονομάζονται οπλισμοί και το μονωτικό υλικό ονομάζεται διηλεκτρικό. Ο πυκνωτής έχει την ιδιότητα να συγκρατεί στους οπλισμούς του ηλεκτρικό φορτίο, όταν εφαρμοστεί μια τάση στα άκρα του. Η ποσότητα του φορτίου που μπορεί να συγκρατήσει ο πυκνωτής εξαρτάται από την επιφάνεια των οπλισμών του και την απόσταση μεταξύ των οπλισμών. όσο μεγαλύτερη είναι η επιφάνεια των οπλισμών και όσο μικρότερη η απόσταση των οπλισμών μεταξύ τους, τόσο μεγαλύτερο φορτίο μπορεί να συγκρατήσει. Το είδος του διηλεκτρικού υλικού παίζει πολύ μεγάλο ρόλο στην συγκράτηση του φορτίου που εκφράζεται με τον όρο χωρητικότητα. ’ρα λοιπόν η ικανότητα ενός πυκνωτή να αποθηκεύει ενέργεια ονομάζεται χωρητικότητα.
Η χωρητικότητα ενός πυκνωτή συμβολίζεται με το γράμμα C και μονάδα μέτρησής της είναι το Farad. Επειδή το Farad (F), είναι μεγάλη χωρητικότητα στους πυκνωτές χρησιμοποιούνται υποδιαιρέσεις του Farad όπως βλέπουμε παρακάτω:
1F=1000mF, 1mF=1000μF, 1μF=1000nF, 1nF=1000pF. Για να είναι ποιο εύκολα κατανοητές οι μονάδες φανταστείτε μια σκάλα, με κορυφή την μέγιστη μονάδα χωρητικότητας και τελευταία την μικρότερη, όπως βλέπουμε κατά σειρά παρακάτω: F>mF>μF>nF>pF.
Κάθε σκάλα που κατεβαίνουμε προς τα κάτω πολλαπλασιάζουμε Χ1000, ενώ όταν ανεβαίνουμε από κάτω προς τα πάνω διαιρούμε :1000. Έτσι για παράδειγμα ένας πυκνωτής που είναι 470nF είναι ίσος με 0,47μF, ή ένας πυκνωτής που είναι 2,2nF είναι ίσος με 2200pF.
#include
Servo myServo; //Create a new servo
int const potPin = A0; //Analog pin for the potentiometer
int potVal; //Values given by the potentiometer
int angle; //values that will modify the angle of the servo
void setup() {
myServo.attach(9); //Makes a servo be controlled by pin 9
Serial.begin(9600); //Initialize Serial monitor
}
void loop() {
potVal = analogRead(potPin); //Giving potVal the values from the potentiometer
Serial.print(“potVal: “); //printing in Serial monitor the values given by the potentiometer
Serial.print(potVal);
angle = map(potVal, 0, 1023, 0, 179); //mapping helps to convert the values from the potentiometer (0-1023) to values accepted to the servo (0-180)
Serial.print(“, angle: “); //Printing out the angle value.
Serial.print(angle);
myServo.write(angle); //Actually making the servo moving, as the angle value changes.
delay(15); //does all those instructions in 15 milliseconds.
}
[youtube https://www.youtube.com/watch?v=FxvzefTUJNk]
Δεν επιτρέπεται σχολιασμός στο ARDUINO 05 MOOD CUE
21 Σεπτεμβρίου 2014
Interactive art with wooden mirrors – The wooden mirror (1/4)
[youtube http://www.youtube.com/watch?v=BZysu9QcceM]
Δεν επιτρέπεται σχολιασμός στο Interactive art with wooden mirrors – The wooden mirror (1/4)